


基于C#的机器人仿真平台和机器人运动学算法实现
一、平台搭建
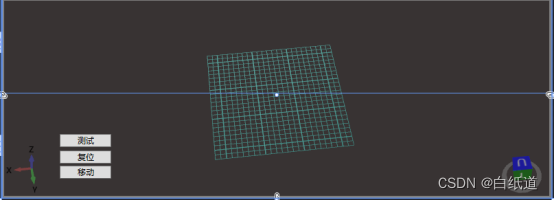
1.利用wpf自带的库进行机器人各关节导入
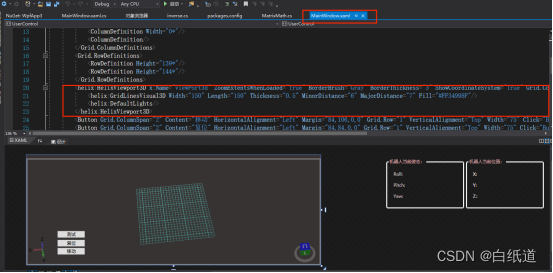
相关代码段:
<Grid.ColumnDefinitions>
<ColumnDefinition Width="0*"/>
<ColumnDefinition/>
</Grid.ColumnDefinitions>
<Grid.RowDefinitions>
<RowDefinition Height="32*"/>
<RowDefinition Height="43*"/>
</Grid.RowDefinitions>
<helix:HelixViewport3D x:Name="viewPort3d" ZoomExtentsWhenLoaded="True" BorderBrush="Gray" BorderThickness="3" ShowCoordinateSystem="True" Grid.ColumnSpan="2" Margin="0,10,0,0" Grid.RowSpan="2" >
<helix:GridLinesVisual3D Width="150" Length="150" Thickness="0.5" MinorDistance="6" MajorDistance="7" Fill="#FF34998F"/>
<helix:DefaultLights/>
</helix:HelixViewport3D>private const string MODEL_PATH1 = "Base.stl";
private const string MODEL_PATH2 = "Asse1.stl";
private const string MODEL_PATH3 = "Asse2.stl";
private const string MODEL_PATH4 = "Asse3.stl";
private const string MODEL_PATH5 = "Asse4.stl";
private const string MODEL_PATH6 = "Asse5.stl";
private const string MODEL_PATH7 = "Asse6.stl";
private const string MODEL_PATH8 = "Leva.stl";
private const string MODEL_PATH9 = "Asta.stl";导入效果如图:

效果视频:

2.通过正运动学显示机器人当前位置信息

拖动机器人并且实时改变其位置信息:
xaml代码部分:
<Slider x:Name="joint1" Grid.ColumnSpan="2" HorizontalAlignment="Left" Margin="1034,61,-607,0" VerticalAlignment="Top" Width="373" Grid.Row="1" ValueChanged="Joint1_ValueChanged" Maximum="180" Minimum="-180" Height="18"/>
<Slider x:Name="joint3" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="23" Margin="1034,121,-607,0" VerticalAlignment="Top" Width="373" Grid.Row="1" Maximum="180" Minimum="-180" ValueChanged="Joint3_ValueChanged"/>
<Slider x:Name="joint5" Grid.ColumnSpan="2" HorizontalAlignment="Left" Margin="1034,183,-607,-25" VerticalAlignment="Top" Width="373" Grid.Row="1" Maximum="180" Minimum="-180" ValueChanged="Joint5_ValueChanged" Height="14"/>
<Slider x:Name="joint6" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="25" Margin="1034,217,-607,-70" Grid.Row="1" VerticalAlignment="Top" Width="373" Maximum="180" Minimum="-180" ValueChanged="Joint6_ValueChanged"/>算法部分:
//第一种DH建模的方式
public static void Q2T(double ai,double di,double θi, double αi, ref double[,] T)
//正运动学方程模型矩阵
public static void Q2T2(double ai, double di, double θi, double αi, ref double[,] T)
public void diretta(double q1, double q2, double q3,
double q4, double q5, double q6, ref double[] C,ref double[,] resR)
{
Q2T2(a0, d1, q1, 0,ref T01);
Q2T2(a1, d2, q2, -90, ref T12);
Q2T2(a2, d3, q3, 0, ref T23);
Q2T2(a3, d4, q4, -90, ref T34);
Q2T2(a4, d5, q5, 90, ref T45);
Q2T2(a5, d6, q6, -90, ref T56);
T02 = math_matrix.MatrixMult(T01,T12);
T03 = math_matrix.MatrixMult(T02, T23);
T04 = math_matrix.MatrixMult(T03, T34);
T05 = math_matrix.MatrixMult(T04, T45);
T06 = math_matrix.MatrixMult(T05, T56);
T35 = math_matrix.MatrixMult(T34, T45);
T36 = math_matrix.MatrixMult(T35, T56);//T36 = t36
double[,] inv03 = math_matrix.MatInverse(T03);
double[,] t36 = math_matrix.MatrixMult(inv03,T06);//T36 = t36
//求得机器人末端相对于机器人基坐标系的位置关系(x,y,z)
C[0] = T06[0, 3];
C[1] = T06[1, 3];
C[2] = T06[2, 3];
initC[0] = T06[0, 3];
initC[1] = T06[1, 3];
initC[2] = T06[2, 3];
R36[0, 0] = T36[0, 0];
R36[0, 1] = T36[0, 1];
R36[0, 2] = T36[0, 2];
R36[1, 0] = T36[1, 0];
R36[1, 1] = T36[1, 1];
R36[1, 2] = T36[1, 2];
R36[2, 0] = T36[2, 0];
R36[2, 1] = T36[2, 1];
R36[2, 2] = T36[2, 2];
}3.功能实现(在X/Y/Z轴上设置一个移动距离,然后机器人自动移动该距离)
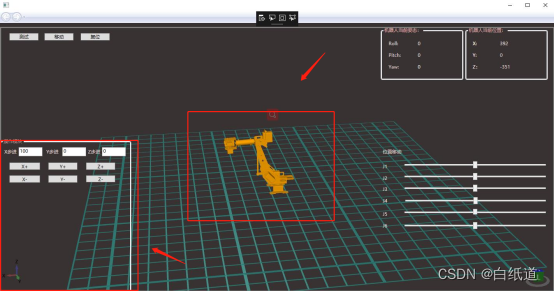
效果如图:

附上运动学算法代码:
public void Rob_Ik(double[] qc, double[] q)
{
}
//我们以RPY作为机器人的旋转方式
public void RPY2R(double[] rpy,ref double[,] R)
{
double cos_roll = Math.Cos(rpy[0]);
double cos_pitch = Math.Cos(rpy[1]);
double cos_yaw = Math.Cos(rpy[2]);
double sin_roll = Math.Sin(rpy[0]);
double sin_pitch = Math.Sin(rpy[1]);
double sin_yaw = Math.Sin(rpy[2]);
R[0, 0] = cos_roll * cos_pitch;
R[0, 1] = (cos_roll * sin_pitch * sin_pitch) - (sin_roll*cos_yaw);
R[0, 2] = (cos_roll * sin_pitch * cos_yaw) - (sin_roll * sin_yaw);
R[1, 0] = sin_roll * cos_pitch;
R[1, 1] = (sin_roll * sin_pitch * sin_yaw) - (cos_roll * cos_yaw);
R[1, 2] = (sin_roll * sin_pitch * cos_yaw) - (cos_roll * sin_yaw);
R[2, 0] = -sin_pitch;
R[2, 1] = cos_pitch * sin_yaw;
R[2, 2] = cos_pitch * cos_yaw;
}
public void R2PRY(double[,] R,ref double[] rpy)
{
rpy[0] = Math.Atan2(R[1,0],R[0,0]);
rpy[1] = Math.Atan2(-R[2, 1], (R[0, 0] * Math.Cos(rpy[0]) + R[1, 0] * Math.Sin(rpy[0])));
rpy[2] = Math.Atan2((-R[1,2]*Math.Cos(rpy[0])+R[0,2]*Math.Sin(rpy[0])),(R[1,1]*Math.Cos(rpy[0])-R[0,1]*Math.Sin(rpy[0])));
}
public void T2E(double[,] R,ref double[] Euler)
{
Euler[0] = Math.Atan2(Math.Sqrt(Math.Pow(R[2,0], 2) +Math. Pow(R[2,1], 2)), R[2,2]);
Euler[1] = Math.Atan2(R[1,2] /Math.Sin(Euler[0]), R[0,2] / Math.Sin(Euler[0]));
Euler[2] = Math.Atan2(R[2,1] /Math.Sin(Euler[0]), -R[2,0] /Math.Sin(Euler[0]));
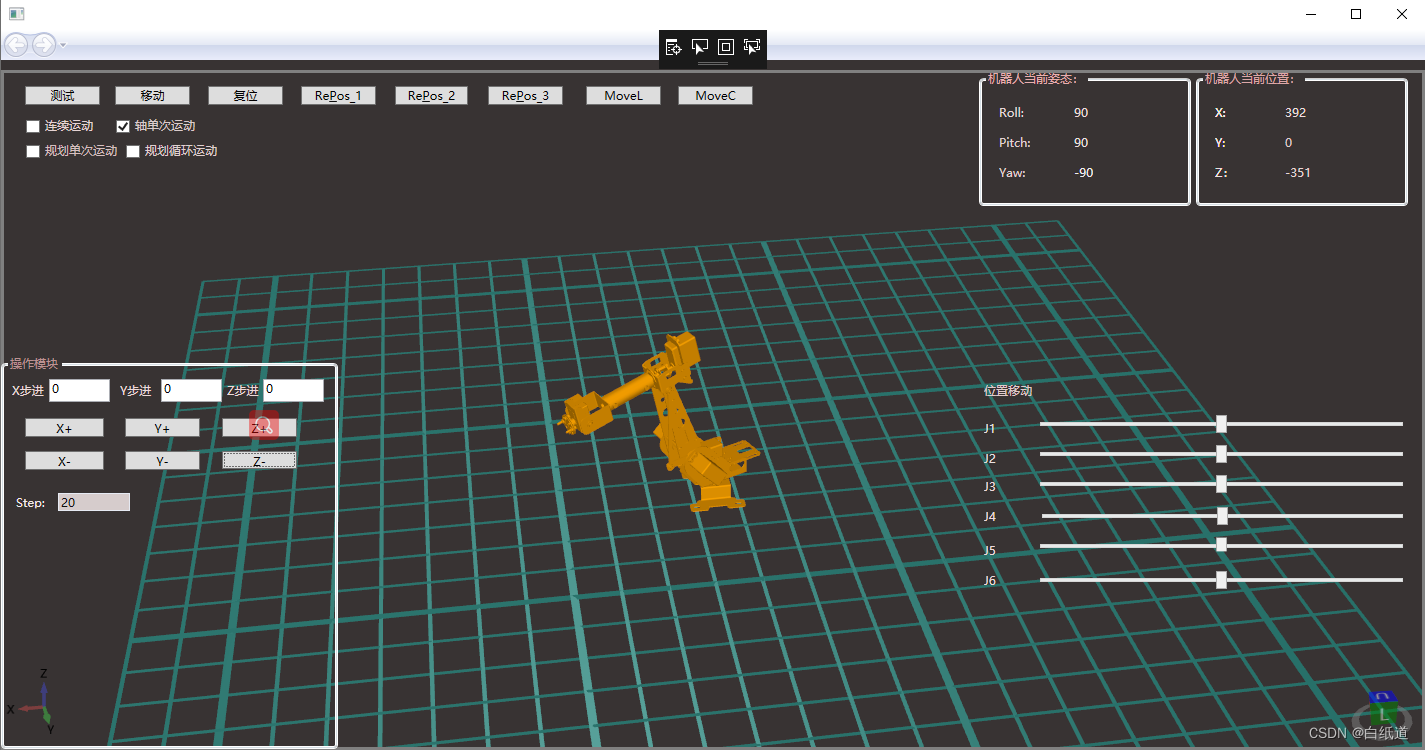
}4.通过选定运动方式和步进参数,单步移动各轴(各轴联合运动)
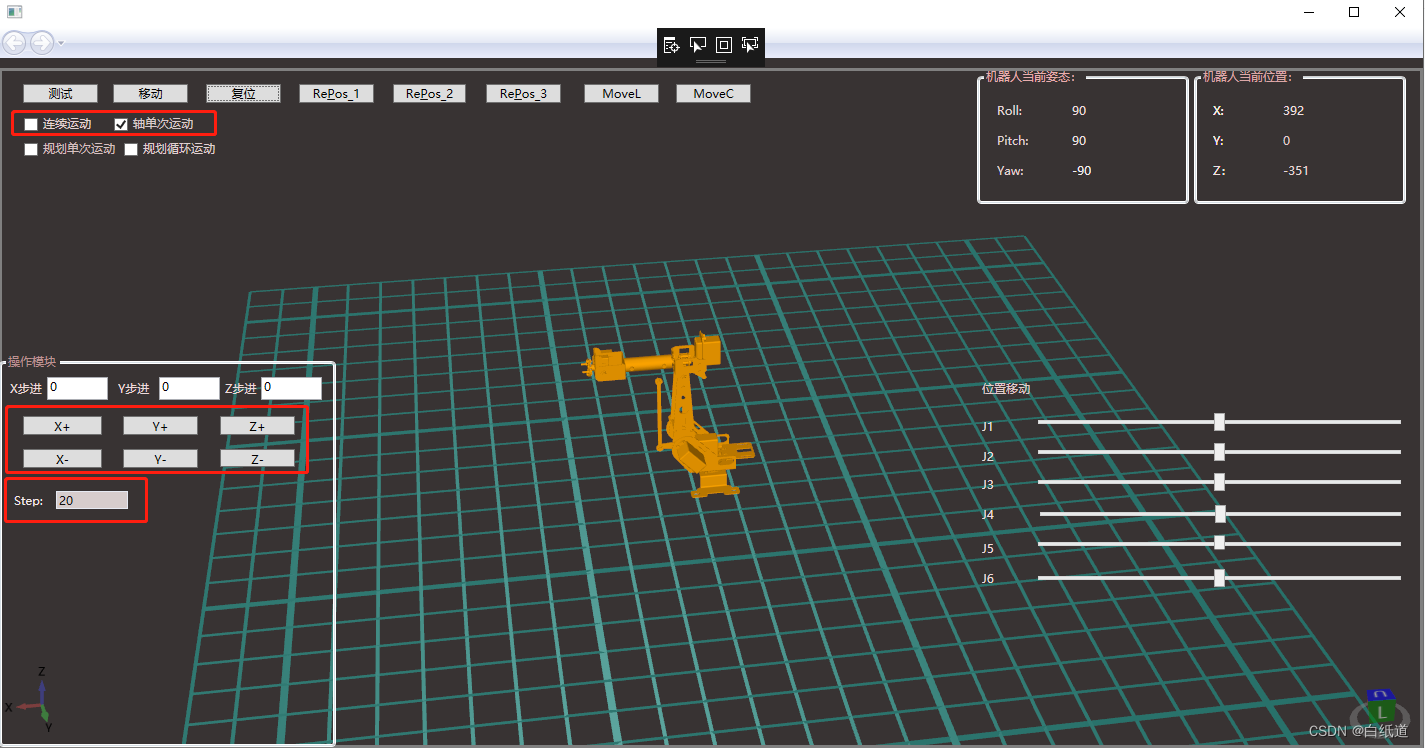
移动后效果图:
效果视频:
代码:
private void Button_Click_4(object sender, RoutedEventArgs e)
{
if (Continuity_Motion.IsChecked == true)
{
minus_x.Clear();
for (int i = 0; i < Convert.ToInt32(text_x.Text); i = i + 1)
{
minus_x.Add(i);
}
for (int j = 0; j < minus_x.Count; j++)
{
double[] qcii = new double[6];
qcii[0] = inverse.initC[0];//移动z
qcii[1] = inverse.initC[1];//移动y
qcii[2] = inverse.initC[2] - minus_x[j];//移动x
qcii[3] = inverse.euler[0];
qcii[4] = inverse.euler[1];
qcii[5] = inverse.euler[2];
double[] q = new double[6];
m_inverse.Rob_Ik(qcii, q);
refresh(inverse.g1, inverse.g2, inverse.g3, inverse.g4 - 90, inverse.g5 - 90, inverse.g6 + 90);
Delay(5);
}
}
else if(Once_Motion.IsChecked == true)
{
qci[0] = inverse.initC[0] + record_z_increase - record_z_reduce;//移动z
qci[1] = inverse.initC[1] + record_y_increase - record_y_reduce;//移动y
oadd_x = oadd_x + Convert.ToDouble(text_step.Text);
qci[2] = inverse.initC[2]+oadd_x-record_x_reduce;//移动x
qci[3] = inverse.euler[0];
qci[4] = inverse.euler[1];
qci[5] = inverse.euler[2];
double[] q = new double[6];
m_inverse.Rob_Ik(qci, q);
refresh(inverse.g1, inverse.g2, inverse.g3, inverse.g4 - 90, inverse.g5 - 90, inverse.g6 + 90);
Delay(5);
}
else
{
MessageBox.Show("请选择移动模式!");
}
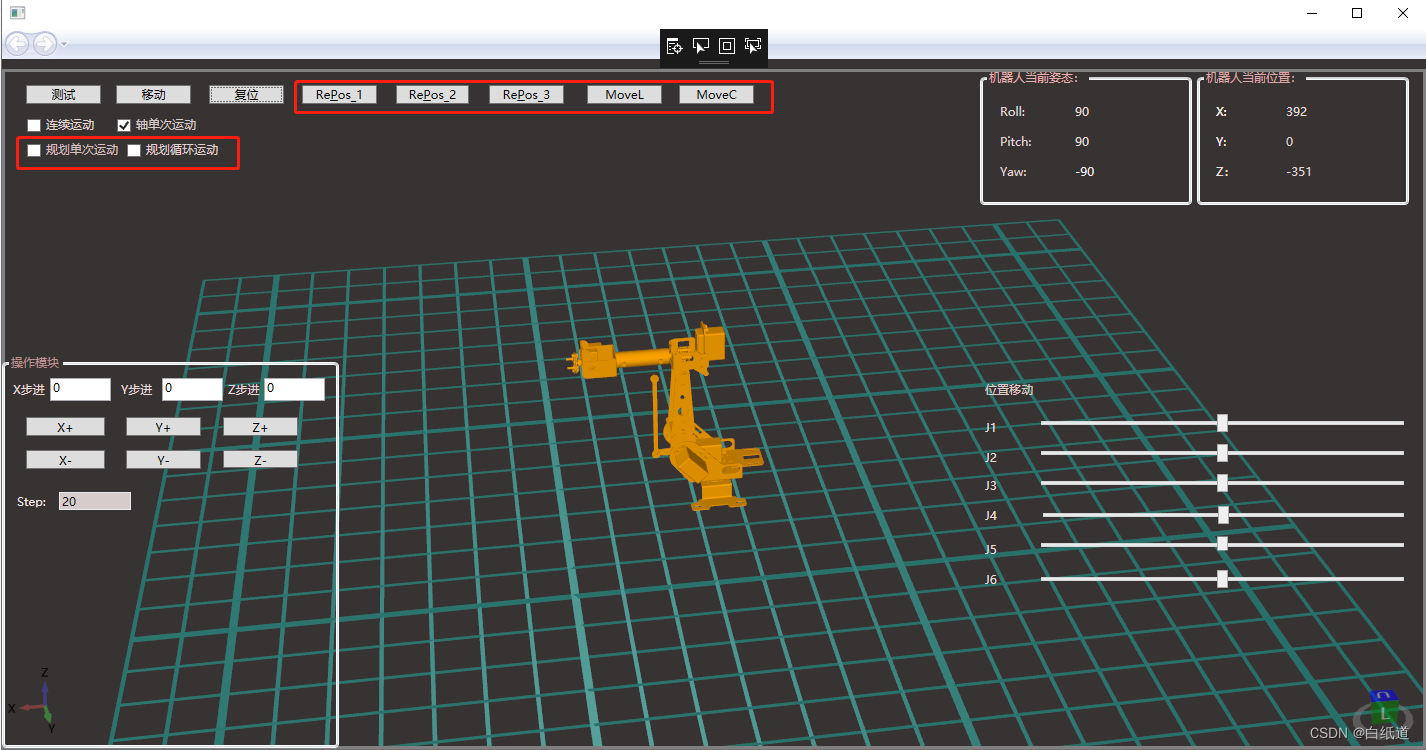
}5.基于直线轨迹规划的机器人移动(规划算法加逆解算法)
效果视频:

代码部分:
public void Plan_path(double xs, double ys, double zs, double xe, double ye, double ze, double speed)
private void Button_Click_9(object sender, RoutedEventArgs e)
{
pos[0] = qci[0];
pos[1] = qci[1];
pos[2] = qci[2];
pos[3] = inverse.g4;
pos[4] = inverse.g5;
pos[5] = inverse.g6;
plp1[0] = pos[0];
plp1[1] = pos[1];
plp1[2] = pos[2];
MessageBox.Show("位置一已记录!");
}
private void Button_Click_10(object sender, RoutedEventArgs e)
{
pos_1[0] = qci[0];
pos_1[1] = qci[1];
pos_1[2] = qci[2];
pos_1[3] = inverse.g4;
pos_1[4] = inverse.g5;
pos_1[5] = inverse.g6;
plp2[0] = pos_1[0];
plp2[1] = pos_1[1];
plp2[2] = pos_1[2];
MessageBox.Show("位置二已记录!");
}
public void LinePath()
{
linerPath.Plan_path(pos[2],pos[1],pos[0],pos_1[2],pos_1[1],pos_1[0],5);
if (loop_sport.IsChecked == true)
{
loop = true;
while (loop)
{
for (int i = 0; i < linerPath.x_start.Count; i++)
{
double[] linepos = new double[6];
linepos[2] = linerPath.x_start[i];
linepos[1] = linerPath.y_start[i];
linepos[0] = linerPath.z_start[i];
linepos[3] = inverse.euler[0];
linepos[4] = inverse.euler[1];
linepos[5] = inverse.euler[2];
double[] q = new double[6];
m_inverse.Rob_Ik(linepos, q);
refresh(inverse.g1, inverse.g2, inverse.g3, inverse.g4 - 90, inverse.g5 - 90, inverse.g6 + 90);
Delay(20);
}
}
}Xaml代码:
<UserControl x:Class="WpfApp3.MainWindow"
xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"
xmlns:x="http://schemas.microsoft.com/winfx/2006/xaml"
xmlns:d="http://schemas.microsoft.com/expression/blend/2008"
xmlns:mc="http://schemas.openxmlformats.org/markup-compatibility/2006"
xmlns:local="clr-namespace:WpfApp3"
xmlns:helix ="http://helix-toolkit.org/wpf"
mc:Ignorable="d"
d:DesignHeight="300" d:DesignWidth="800" Background="#FF383333">
<Grid>
<Grid.ColumnDefinitions>
<ColumnDefinition Width="0*"/>
<ColumnDefinition/>
</Grid.ColumnDefinitions>
<Grid.RowDefinitions>
<RowDefinition Height="32*"/>
<RowDefinition Height="43*"/>
</Grid.RowDefinitions>
<helix:HelixViewport3D x:Name="viewPort3d" ZoomExtentsWhenLoaded="True" BorderBrush="Gray" BorderThickness="3" ShowCoordinateSystem="True" Grid.ColumnSpan="2" Margin="0,10,0,0" Grid.RowSpan="2" >
<helix:GridLinesVisual3D Width="150" Length="150" Thickness="0.5" MinorDistance="6" MajorDistance="7" Fill="#FF34998F"/>
<helix:DefaultLights/>
</helix:HelixViewport3D>
<Button Content="移动" HorizontalAlignment="Left" Margin="114,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click" Grid.ColumnSpan="2" Height="19"/>
<Button Content="复位" HorizontalAlignment="Left" Margin="207,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click_1" Grid.ColumnSpan="2" Height="19"/>
<Button Content="测试" HorizontalAlignment="Left" Margin="24,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click_2" Grid.ColumnSpan="2" Height="19"/>
<GroupBox Grid.ColumnSpan="2" Header="机器人当前位置:" HorizontalAlignment="Left" Height="136" Margin="1195,10,-607,0" VerticalAlignment="Top" Width="212" Foreground="#FFDCA7A7" Grid.RowSpan="2"/>
<Label Grid.ColumnSpan="2" Content="Z:" HorizontalAlignment="Left" Margin="1209,100,-509,0" VerticalAlignment="Top" Width="100" Background="{x:Null}" Foreground="#FFECDFDF" Height="25"/>
<Label Grid.ColumnSpan="2" Content="X:" HorizontalAlignment="Left" Margin="1209,40,-509,0" VerticalAlignment="Top" Width="100" Foreground="#FFF5E4E4" Height="25"/>
<Label Grid.ColumnSpan="2" Content="Y:" HorizontalAlignment="Left" Margin="1209,70,-509,0" VerticalAlignment="Top" Width="100" Foreground="#FFEEDFDF" Height="25"/>
<Label x:Name="lable_x" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1279,40,-579,0" VerticalAlignment="Top" Width="100" Foreground="#FFEEDEDE" Height="25"/>
<Label x:Name="lable_y" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1279,70,-579,0" VerticalAlignment="Top" Width="100" Foreground="#FFE2CCCC" Height="25"/>
<Label x:Name="lable_z" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1279,100,-579,0" VerticalAlignment="Top" Width="100" Foreground="#FFE8D6D6" Height="25"/>
<Label Grid.ColumnSpan="2" Content="Z:" HorizontalAlignment="Left" Margin="1209,100,-509,0" VerticalAlignment="Top" Width="100" Background="{x:Null}" Foreground="#FFECDFDF" Height="25"/>
<Label Grid.ColumnSpan="2" Content="Y:" HorizontalAlignment="Left" Margin="1209,70,-509,0" VerticalAlignment="Top" Width="100" Foreground="#FFEEDFDF" Height="25"/>
<Label Grid.ColumnSpan="2" Content="X:" HorizontalAlignment="Left" Margin="1209,40,-509,0" VerticalAlignment="Top" Width="100" Foreground="#FFF5E4E4" Height="25"/>
<GroupBox Grid.ColumnSpan="2" Header="机器人当前姿态:" HorizontalAlignment="Left" Height="136" Margin="978,10,-390,0" VerticalAlignment="Top" Width="212" Foreground="#FFE8AEAE" Grid.RowSpan="2"/>
<Label Grid.ColumnSpan="2" Content="Roll:" HorizontalAlignment="Left" Margin="993,40,-293,0" VerticalAlignment="Top" Width="100" Foreground="#FFE6D8D8" Height="25"/>
<Label Grid.ColumnSpan="2" Content="Pitch:" HorizontalAlignment="Left" Margin="993,70,-293,0" VerticalAlignment="Top" Width="100" Foreground="#FFE2D2D2" Height="25"/>
<Label Grid.ColumnSpan="2" Content="Yaw:" HorizontalAlignment="Left" Margin="993,100,-293,0" VerticalAlignment="Top" Width="100" Foreground="#FFE4D3D3" Height="25"/>
<Label x:Name="lable_R" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1068,40,-368,0" VerticalAlignment="Top" Width="100" Foreground="#FFF0DDDD" Height="25"/>
<Label x:Name="lable_P" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1068,70,-368,0" VerticalAlignment="Top" Width="100" Foreground="#FFEEE2E2" Height="25"/>
<Label x:Name="lable_Y" Grid.ColumnSpan="2" Content=" " HorizontalAlignment="Left" Margin="1068,100,-368,0" VerticalAlignment="Top" Width="100" Foreground="#FFF3EFEF" Height="25"/>
<Slider HorizontalAlignment="Left" Height="0" Margin="-290,88,0,0" VerticalAlignment="Top" Width="48"/>
<Label Grid.ColumnSpan="2" Content="位置移动" HorizontalAlignment="Left" Margin="978,23,-236,0" VerticalAlignment="Top" Foreground="#FFE0CBCB" Grid.Row="1" Height="25" Width="58"/>
<Slider x:Name="joint1" Grid.ColumnSpan="2" HorizontalAlignment="Left" Margin="1034,61,-607,0" VerticalAlignment="Top" Width="373" Grid.Row="1" ValueChanged="Joint1_ValueChanged" Maximum="180" Minimum="-180" Height="18"/>
<Slider x:Name="joint3" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="23" Margin="1034,121,-607,0" VerticalAlignment="Top" Width="373" Grid.Row="1" Maximum="180" Minimum="-180" ValueChanged="Joint3_ValueChanged"/>
<Slider x:Name="joint5" Grid.ColumnSpan="2" HorizontalAlignment="Left" Margin="1034,183,-607,-25" VerticalAlignment="Top" Width="373" Grid.Row="1" Maximum="180" Minimum="-180" ValueChanged="Joint5_ValueChanged" Height="14"/>
<Slider x:Name="joint6" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="25" Margin="1034,217,-607,-70" Grid.Row="1" VerticalAlignment="Top" Width="373" Maximum="180" Minimum="-180" ValueChanged="Joint6_ValueChanged"/>
<Label Grid.ColumnSpan="2" Content="J1" HorizontalAlignment="Left" Margin="978,61,-213,0" Grid.Row="1" VerticalAlignment="Top" Width="35" Foreground="#FFE8E0E0" Height="25"/>
<Label Grid.ColumnSpan="2" Content="J2" HorizontalAlignment="Left" Margin="978,91,-213,0" Grid.Row="1" VerticalAlignment="Top" Width="35" Foreground="#FFE8E0E0" Height="25"/>
<Label Grid.ColumnSpan="2" Content="J3" HorizontalAlignment="Left" Height="25" Margin="978,119,-213,0" Grid.Row="1" VerticalAlignment="Top" Width="35" Background="{x:Null}" Foreground="#FFF0DCDC"/>
<Label Grid.ColumnSpan="2" Content="J4" HorizontalAlignment="Left" Height="25" Margin="978,149,-213,-2" Grid.Row="1" VerticalAlignment="Top" Width="35" Background="{x:Null}" Foreground="#FFF0DCDC"/>
<Label Grid.ColumnSpan="2" Content="J5" HorizontalAlignment="Left" Height="25" Margin="978,183,-213,-36" Grid.Row="1" VerticalAlignment="Top" Width="35" Background="{x:Null}" Foreground="#FFF0DCDC"/>
<Label Grid.ColumnSpan="2" Content="J6" HorizontalAlignment="Left" Height="25" Margin="978,213,-213,-66" Grid.Row="1" VerticalAlignment="Top" Width="35" Background="{x:Null}" Foreground="#FFF0DCDC"/>
<Slider x:Name="joint2" Grid.ColumnSpan="2" HorizontalAlignment="Left" Margin="1034,91,-607,0" Grid.Row="1" VerticalAlignment="Top" Width="373" Maximum="180" Minimum="-180" ValueChanged="Joint2_ValueChanged" Height="18"/>
<Slider x:Name="joint4" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="21" Margin="1036,153,-607,-2" Grid.Row="1" VerticalAlignment="Top" Width="371" Maximum="180" Minimum="-180" ValueChanged="Joint4_ValueChanged"/>
<Button Grid.ColumnSpan="2" Content="X+" HorizontalAlignment="Left" Height="19" Margin="24,64,0,0" Grid.Row="1" VerticalAlignment="Top" Width="79" Click="Button_Click_3"/>
<Button Grid.ColumnSpan="2" Content="X-" HorizontalAlignment="Left" Height="19" Margin="24,97,0,0" Grid.Row="1" VerticalAlignment="Top" Width="79" Click="Button_Click_4"/>
<Button Grid.ColumnSpan="2" Content="Y+" HorizontalAlignment="Left" Height="19" Margin="124,64,0,0" Grid.Row="1" VerticalAlignment="Top" Width="75" Click="Button_Click_5" RenderTransformOrigin="0.049,0.469"/>
<Button Grid.ColumnSpan="2" Content="Y-" HorizontalAlignment="Left" Height="19" Margin="124,97,0,0" Grid.Row="1" VerticalAlignment="Top" Width="75" Click="Button_Click_6"/>
<Button Grid.ColumnSpan="2" Content="Z+" HorizontalAlignment="Left" Height="19" Margin="221,64,0,0" Grid.Row="1" VerticalAlignment="Top" Width="75" Click="Button_Click_7"/>
<Button Grid.ColumnSpan="2" Content="Z-" HorizontalAlignment="Left" Height="18" Margin="221,97,0,0" Grid.Row="1" VerticalAlignment="Top" Width="75" Click="Button_Click_8"/>
<TextBox x:Name="text_y" HorizontalAlignment="Left" Height="23" Margin="160,25,0,0" Grid.Row="1" TextWrapping="Wrap" Text="0" VerticalAlignment="Top" Width="61" Grid.ColumnSpan="2"/>
<TextBox x:Name="text_z" HorizontalAlignment="Left" Height="23" Margin="262,25,0,0" Grid.Row="1" TextWrapping="Wrap" Text="0" VerticalAlignment="Top" Width="61" Grid.ColumnSpan="2"/>
<Label Content="X步进" HorizontalAlignment="Left" Height="27" Margin="6,23,0,0" VerticalAlignment="Top" Background="{x:Null}" Foreground="#FFEEDADA" Width="51" Grid.Row="1" Grid.ColumnSpan="2"/>
<Label Content="Y步进" HorizontalAlignment="Left" Height="27" Margin="114,23,0,0" Grid.Row="1" VerticalAlignment="Top" Background="{x:Null}" Foreground="#FFEEDADA" Width="51" Grid.ColumnSpan="2"/>
<Label Content="Z步进" HorizontalAlignment="Left" Height="27" Margin="221,23,0,0" Grid.Row="1" VerticalAlignment="Top" Background="{x:Null}" Foreground="#FFEEDADA" Width="51" Grid.ColumnSpan="2"/>
<TextBox x:Name="text_x" HorizontalAlignment="Left" Height="23" Margin="48,25,0,0" TextWrapping="Wrap" Text="0" VerticalAlignment="Top" Width="61" Grid.Row="1" RenderTransformOrigin="2.574,1.522" Grid.ColumnSpan="2"/>
<GroupBox Grid.ColumnSpan="2" Header="操作模块" HorizontalAlignment="Left" Height="395" VerticalAlignment="Top" Width="337" Margin="0,0,0,-199" Foreground="#FFBD9292" Grid.Row="1"/>
<CheckBox x:Name="Continuity_Motion" Content="连续运动" HorizontalAlignment="Left" Margin="24,59,0,0" VerticalAlignment="Top" Foreground="#FFE6D4D4" Grid.ColumnSpan="2"/>
<CheckBox x:Name="Once_Motion" Grid.ColumnSpan="2" Content="轴单次运动" HorizontalAlignment="Left" Margin="114,59,0,0" VerticalAlignment="Top" Foreground="#FFDACCCC" IsChecked="True"/>
<TextBox x:Name="text_step" Grid.ColumnSpan="2" HorizontalAlignment="Left" Height="18" Margin="57,139,0,0" TextWrapping="Wrap" Text="0" VerticalAlignment="Top" Width="72" Background="#FFD6CCCC" BorderBrush="#FFE6EAF3" Foreground="#FF111010" Grid.Row="1"/>
<Label Grid.ColumnSpan="2" Content="Step:" HorizontalAlignment="Left" Margin="10,135,0,0" VerticalAlignment="Top" Height="24" Grid.Row="1" Width="57" Foreground="#FFF3EAEA"/>
<Button Grid.ColumnSpan="2" Content="Re_Pos_1" HorizontalAlignment="Left" Margin="300,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click_9"/>
<Button Grid.ColumnSpan="2" Content="Re_Pos_2" HorizontalAlignment="Left" Margin="394,26,0,0" VerticalAlignment="Top" Width="73" Click="Button_Click_10"/>
<Button Grid.ColumnSpan="2" Content="MoveL" HorizontalAlignment="Left" Margin="585,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click_11"/>
<CheckBox x:Name="Once_sport" Grid.ColumnSpan="2" Content="规划单次运动" HorizontalAlignment="Left" Margin="24,84,0,0" VerticalAlignment="Top" Foreground="#FFD6C0C0"/>
<CheckBox x:Name="loop_sport" Grid.ColumnSpan="2" Content="规划循环运动" HorizontalAlignment="Left" Margin="124,84,0,0" VerticalAlignment="Top" RenderTransformOrigin="0.434,0.4" Foreground="#FFE0D0D0"/>
<Button Grid.ColumnSpan="2" Content="Re_Pos_3" HorizontalAlignment="Left" Margin="487,26,0,0" VerticalAlignment="Top" Width="75" RenderTransformOrigin="0.613,0.368" Click="Button_Click_12"/>
<Button Grid.ColumnSpan="2" Content="MoveC" HorizontalAlignment="Left" Margin="677,26,0,0" VerticalAlignment="Top" Width="75" Click="Button_Click_13"/>
</Grid>
</UserControl>
欢迎添加qq:675260963进行技术交流!
智能推荐

ros用Python程序控制moveit机器人运动-正向运动学(一)
ros用Python程序控制moveit机器人运动-正向运动学(一) 笔者工作环境: ros-kinetic universal_robot功能包 在进行此工作之前,我相信读者可以通过运行demo程序,在rviz-moveit中可以通过拖动机械臂的末端简单实现机器人的控制,然而我们在控制机械臂运动的时候大都是通过编程的方式控制,而不是Rviz的图形化控制。 本教程以ur3机械臂模型为例,首先看一下...

ros用Python程序控制moviet机器人运动-逆运动学(二)
ros用Python程序控制moviet机器人运动-逆运动学(二) 笔者运行环境: ubuntu16.04 ros-kinetic universal_robot功能包 以ur机械臂为例 逆运动学规划的例程,逆运动学规划简单的说就是直接给机械臂末端机构需要到达目标的位置,由系统求出逆解之后进行路径规划,从而实现的机械臂运动。 1.将universal_robot功能包拷贝到src目录下,并且在sr...
JDK容器类Map源码解读
java.util.Map接口是JDK1.2开始提供的一个基于键值对的散列表接口,其设计的初衷是为了替换JDK1.0中的java.util.Dictionary抽象类。Dictionary是JDK最初的键值对类,它不可以存储null作为key和value,目前这个类早已不被使用了。目前都是在使用Map接口,它是可以存储null值作为key和value,但Map的key是不可以重复的。其常用的实现类...

vue移动端中手写一个树形结构业务,页面见里面
我这个业务需求是根据后台传给我的树形结构数据写的一个选择仓库的功能 由于一开始选框架选错了用cube ui 导致现在好多功能都必须自己写,所以才有了现在。 上图是我的第一级别 上图是我的最后一级 我这里实现是用的递归 首先当然是在页面写上获取仓库的接口啦 先上html js代码 可能注释不是很详细, 第一次发表这么长一段 有什么问题可以在下面说一下,我看到就回复...

WebRTC 系列文章 一对一视频通话和文字聊天
WebRTC 系列文章 一对一视频通话和文字聊天 环境准备 码代码 首先是信令服务器 引入依赖 信令服务器 网页 javascrpit 测试结果 这是WebRTC系列文章的第三篇。这次我们来实现一个可以一对一视频通话和有文字聊天功能的项目。 如果你对WebSocket、ICE、SDP、这些知识还不是很了解的话,推荐你先看下文章末尾的几篇推荐文章。 在此特别感谢 前端李老师的帮助 环境准备 桌面游览...
猜你喜欢
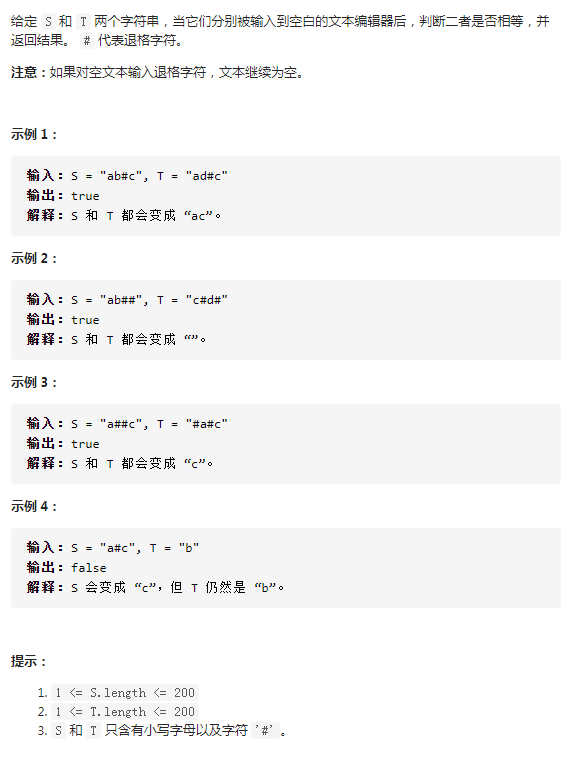
LeetCode -844. 比较含退格的字符串(栈、双指针)
比较含退格的字符串 方法一(栈): 方法二:双指针 一个字符是否会被删掉,只取决于该字符后面的退格符,而与该字符前面的退格符无关。因此当我们逆序地遍历字符串,就可以立即确定当前字符是否会被删掉。...

Java递归与迭代求斐波那契数列
Fibonacci 数列: 指的是这样一个数列:1、1、2、3、5、8、13、21、34……即从第三项开始,每一项等于它的前两项之和。 递归 程序调用自身的编程技巧称为递归。递归做为一种算法在程序设计语言中广泛应用。 一个过程或函数其定义或说明中有直接或间接调用自身的一种方法,它通常把一个大型复杂的问题层层转化为一个与原问题相似的规模较小的问题来求解,递归策略只需少量的...


Redis(三):Redis的内存淘汰机制与持久化机制
一:Redis的内存淘汰机制 redis 设置过期时间 Redis中有个设置时间过期的功能,即对存储在 redis 数据库中的值可以设置一个过期时间。作为一个缓存数据库,这是非常实用的。如我们一般项目中的 token 或者一些登录信息,尤其是短信验证码都是有时间限制的,按照传统的数据库处理方式,一般都是自己判断过期,这样无疑会严重影响项目性能。 我们 set key 的时候,都可以给...

druid连接池配置监控页面
jdbc.properties相关配置 spring-content.xml相关配置 web.xml 相关配置 以上三种配置完成后输入localhost:8080/druid/index.jsp,监控页面显示如下图: ...

